智能衝燈警報系統
簡介
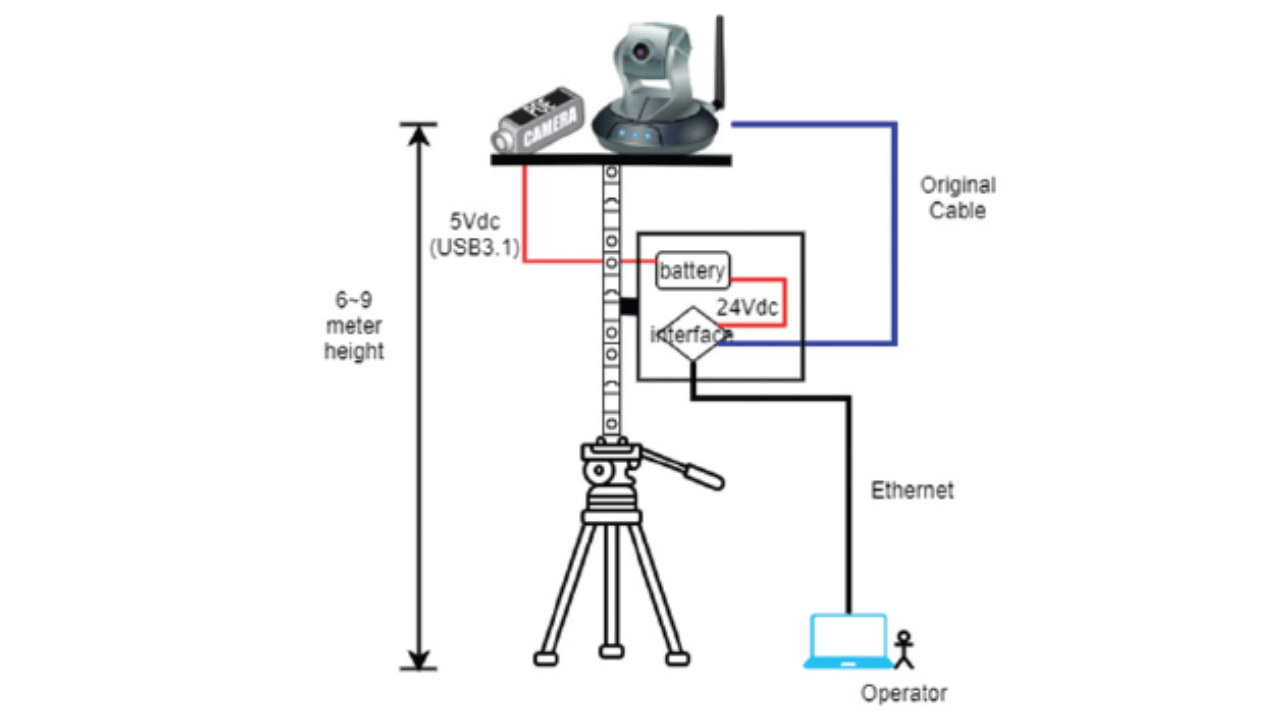
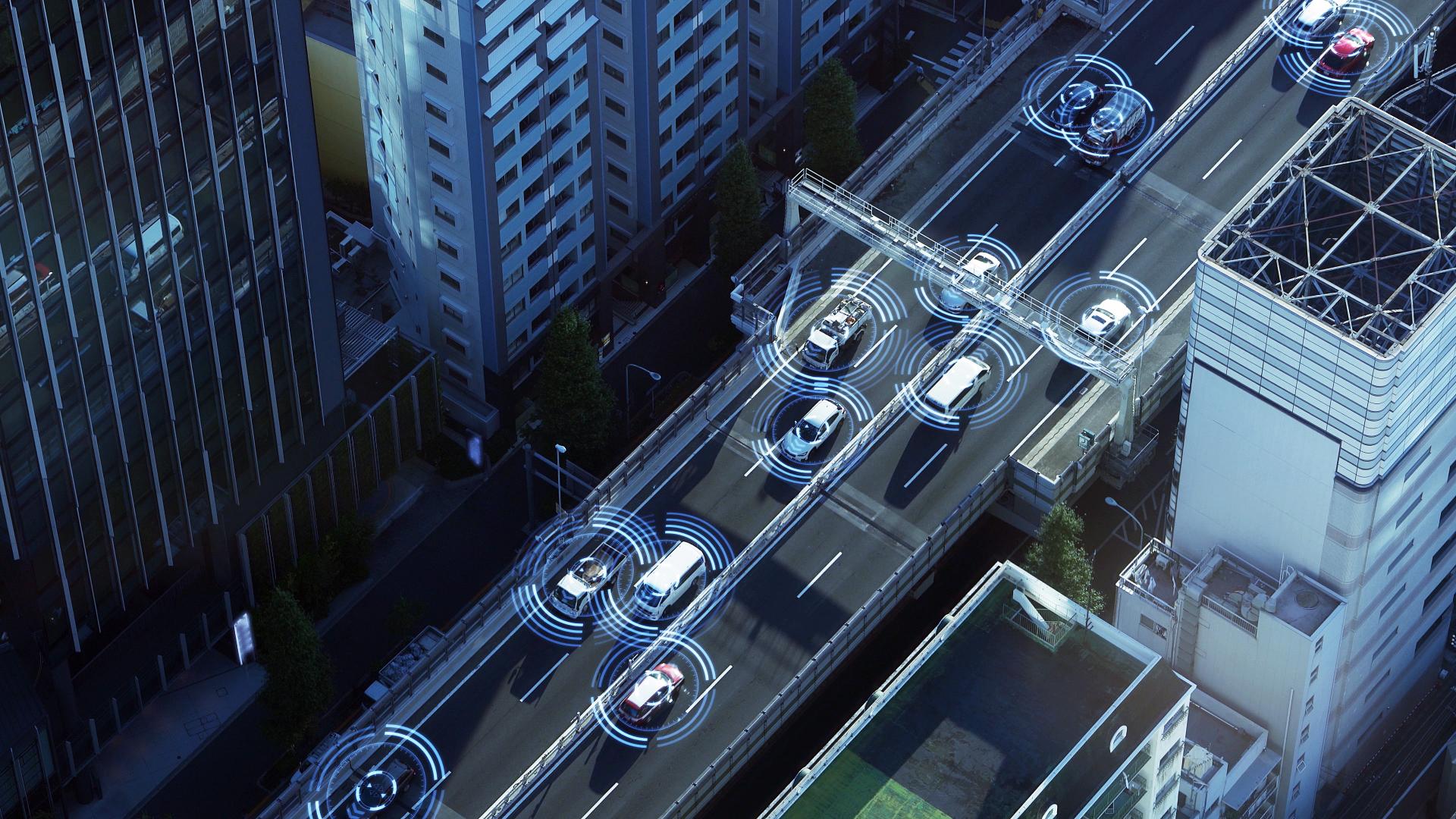
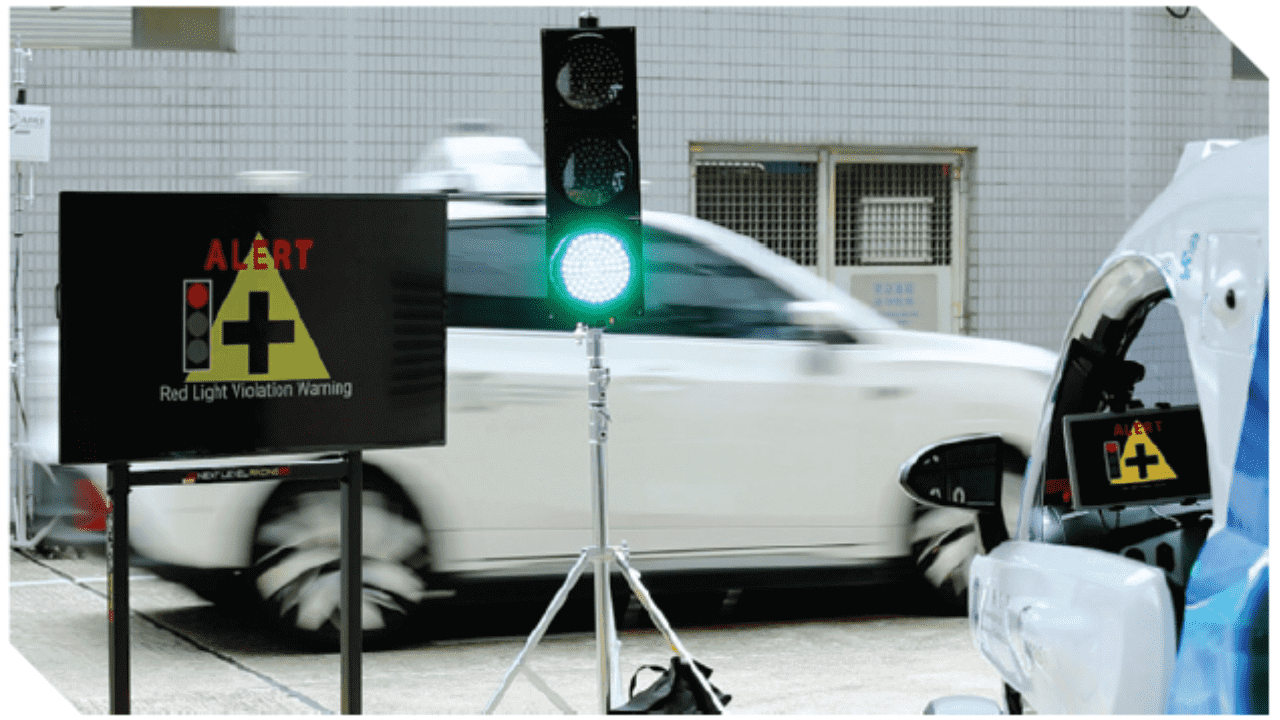
此系統利用邊緣計算和人工智能及車聯網技術,只需配備圖像處理器的攝像頭、路側單元和車載單元,就能夠準確檢測在十字路口中駛向不同方向的車輛類型、位置、車速,同時估算車輛與停車線的距離和所需煞車時間。當偵測到車輛無法在轉紅燈前停下,系統會發出警報。


創新技術名稱
衝紅燈預警系統
完成研究日期
2021
商品化機會
獨家授權
解決方案
現有的衝紅燈拍攝技術能夠在衝紅燈事件發生後協助作出檢控,但無助預測和預防事故,或降低因潛在衝紅燈事件而造成的人命和財產損失。
創新技術
- 通過HSV(色調、飽和度、亮度)色彩空間的圖像處理檢測交通燈訊號,根據亮度估計燈是開還是關,並透過計算綠、黃、紅顏色像素點的數量來判斷交通燈訊號
- 通過人工智能圖像識別和大數據分析進行距離估算,根據車寬和軸距估算像素到像素的距離,並從垂直和水平方向生成距離權重圖
- 比較基於距離估計車輛於停止線停下的時間與估計的速度,以及不同車型的制動系數的車輛靜止時間,然後以噪聲過濾器排除誤報
主要成效
- 交通燈訊號由視覺圖像攝像頭偵測,無需物理訊號分接,大幅提升系統部署效率
- 利用了本地常見車型作為深度學習模型
- 如預計到車輛無法在紅燈前停下,便能作出預警,為所有道路使用者提供更多反應時間,偵測準確率高達 96%
- 通過 C-V2X 廣播紅燈違規警報,提醒駕駛者和自動駕駛車輛避免前方事故,促進智慧城市的發展
應用範疇
- 位於十字路口的主要交通事故黑點
- 可加裝在傳統交通燈系統上,升級為智能交通系統
- 部署到鐵路交叉口,以提醒輕軌或火車駕駛者有機會於前方碰上的汽車
專利申請
- 香港短期專利 (HK30040344)
- 正在申請中國發明專利
汽車科技研發中心
香港特區政府創新科技署在2006年成立汽車科技研發中心,並由香港生産力促進局承辦。多年來,一直透過技術研發,並與業界、大學和技術機構合作,把研發成果轉化為商品,從而促進汽車科技的發展。本研發中心成立以來,已執行項目超過一百多個。主力研發方向包括綠色運輸、智慧移動和智能系統。研發中心與香港生產力促進局於2012年11月1日成為生產力局的一部份。
查詢