Signalised Intersection Collision Avoidance Platform by Vehicle-to-Infrastructure (V2I) application
Overview
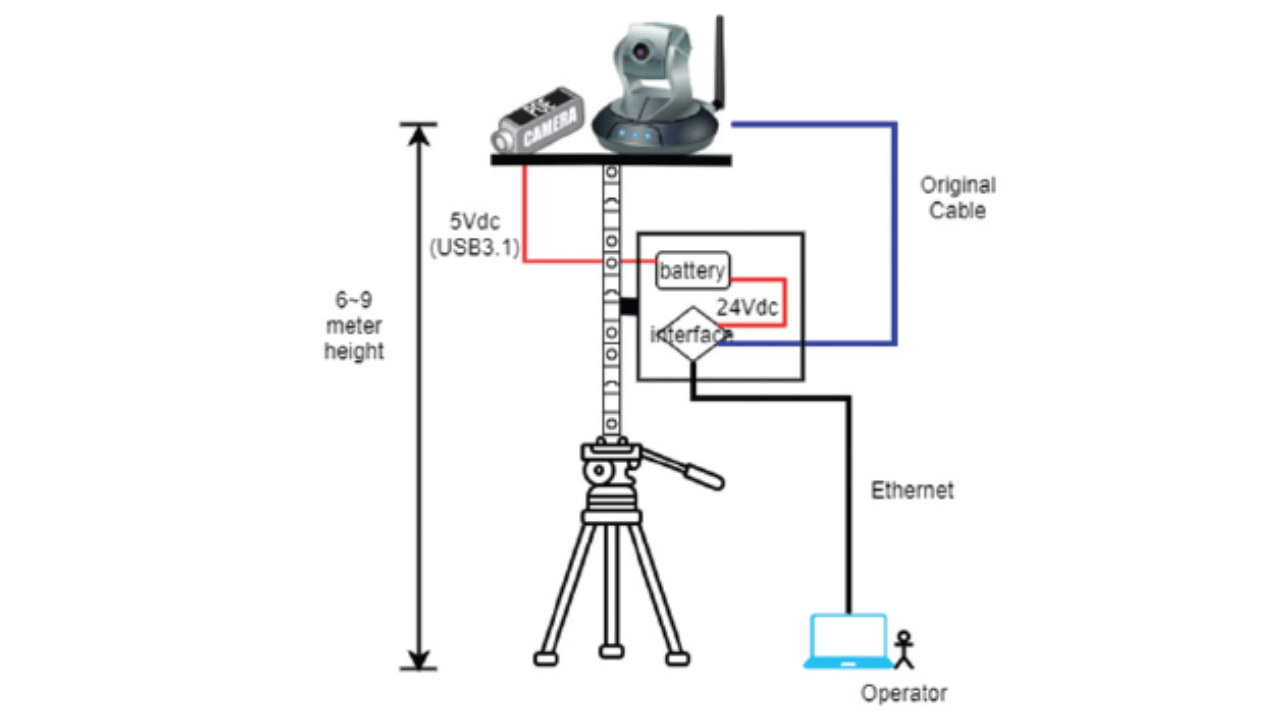
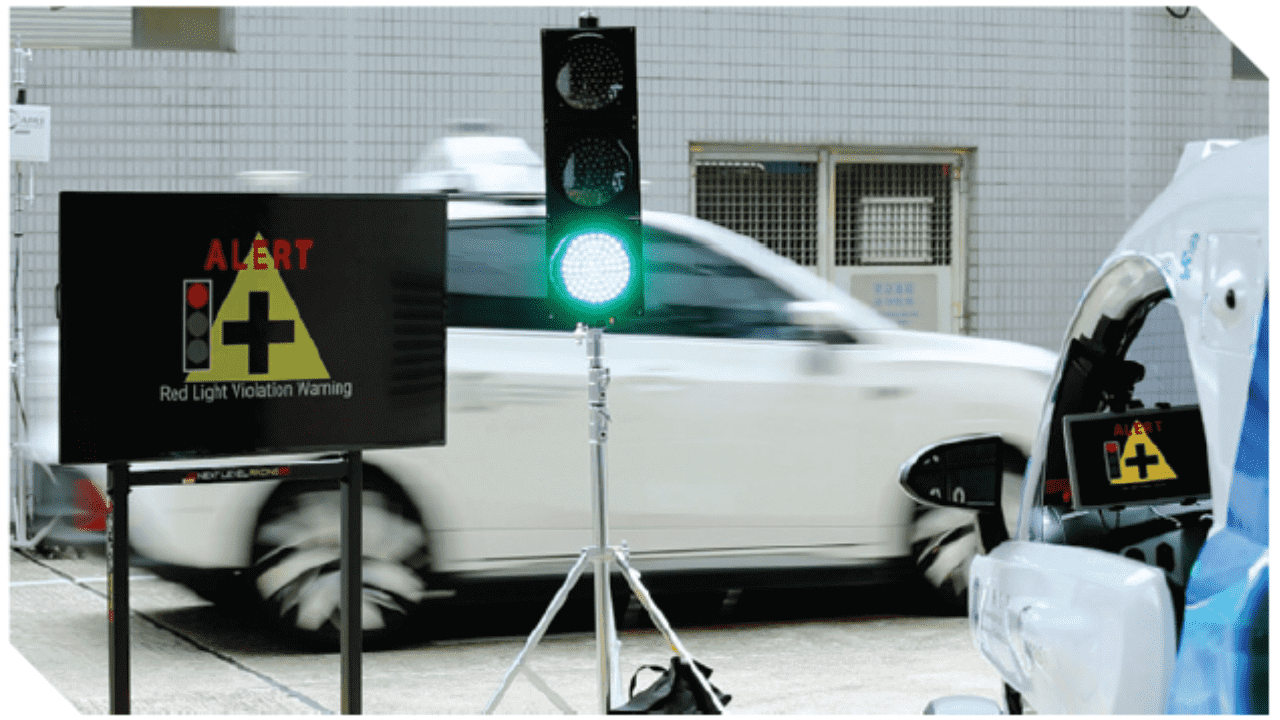
This system utilises edge computing, Artificial Intelligence (AI) and Vehicle-to-Everything (V2X) technology at a signalised intersection. Easy-to-install and cost effective, The system only comprises a camera with image processor, a Road Side Unit (RSU) and an On-Board Unit (OBU) for detecting the on-coming vehicles’ locations, speeds, vehicle types and estimating the travelling time and required stop time at the same time. If the system predicts that a vehicle cannot stop securely in front of the stop line when traffic light is about to turn red, warning will be delivered.


Technical name of innovation
Red-Light Violation Detection and Warning System
Research completion
2021
Commercialisation opportunities
Exclusive licensing
Problem addressed
Existing Red-Light Camera technology is capable for facilitating prosecution after a red-light violation event happened, but unable to help predict and prevent accident, or reduce the damage to human life and properties from a potential red-light violation event.
Innovation
- Detect traffic light signal by image processing with HSV (hue, saturation, value) colour space. Estimate if the light is on or off with brightness, and count the number of pixels of with green, yellow and red colours to determine the traffic light signal
- Estimate distance estimation by image recognition with AI and big data analysis. Estimate distance from pixel to pixel based on vehicle width and wheel base distance, and generate distance weight map from vertical and horizontal aspects
- Compare the time required for a vehicle to halt at the stop line with estimated speed based on distance estimation, and the time for a vehicle to stand still from the braking co-efficient of different vehicle types, and then apply noise filter to rule out false positive
Key impact
- Detect traffic light signal by visual image camera, no physical signal tapping needed, which can highly increase the efficiency of system deployment
- Deep learning model was applied to common vehicles models in Hong Kong
- Provide red-light violation alert if it is estimated that a vehicle cannot halt at the stop line in time, allowing more time for all road users to repond, with up to 96% detection accuracy
- Broadcast red-light violation alert through C-V2X, alerting both drivers and autonomous vehicles to avoid accident ahead, while enhancing the development of smart city
Application
- Major traffic accident black spots at road intersections
- Adaptable to traditional traffic light systems for upgrading to intelligent transport system
- Deploy onto railroad crossing to alert light rail or train drivers for potential vehicles crossing ahead
Patent
- Hong Kong Short-term Patent (HK30040344)
- Pending PRC invention patent
Centre of Advanced Power and Autonomous Systems (APAS)
Centre of Advanced Power and Autonomous Systems (APAS) (formerly Automotive Platforms and Application Systems R&D Centre) was established in 2006 and is fully integrated as a business division under HKPC on 1 April 2025. APAS continues to undertake market-led R&D programmes spanning green transportation, smart mobility, intelligent systems and emerging applications, as well as commercialises R&D results in collaboration with industry, universities and technology institutes to enhance the competitiveness of Hong Kong's automotive and other transportation sectors in new energy and smart driving.
Enquiry