一种用于人机协作时预测人类后续动作的方法

简介
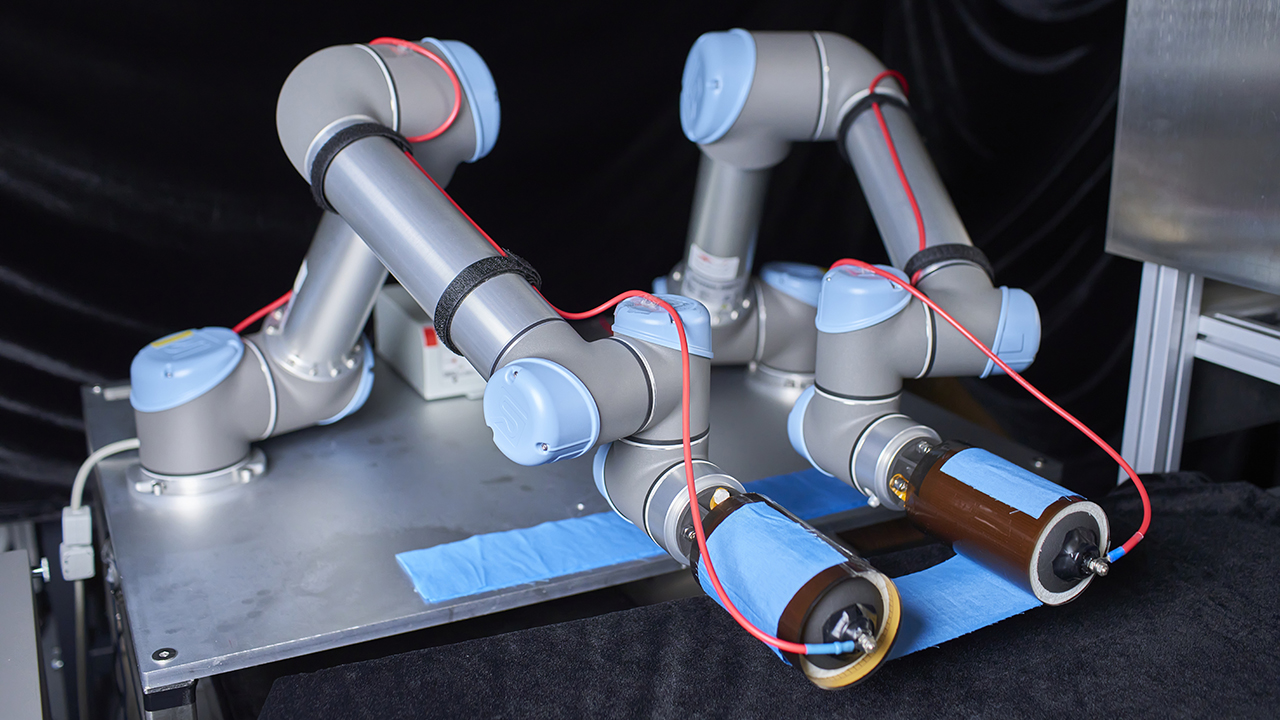
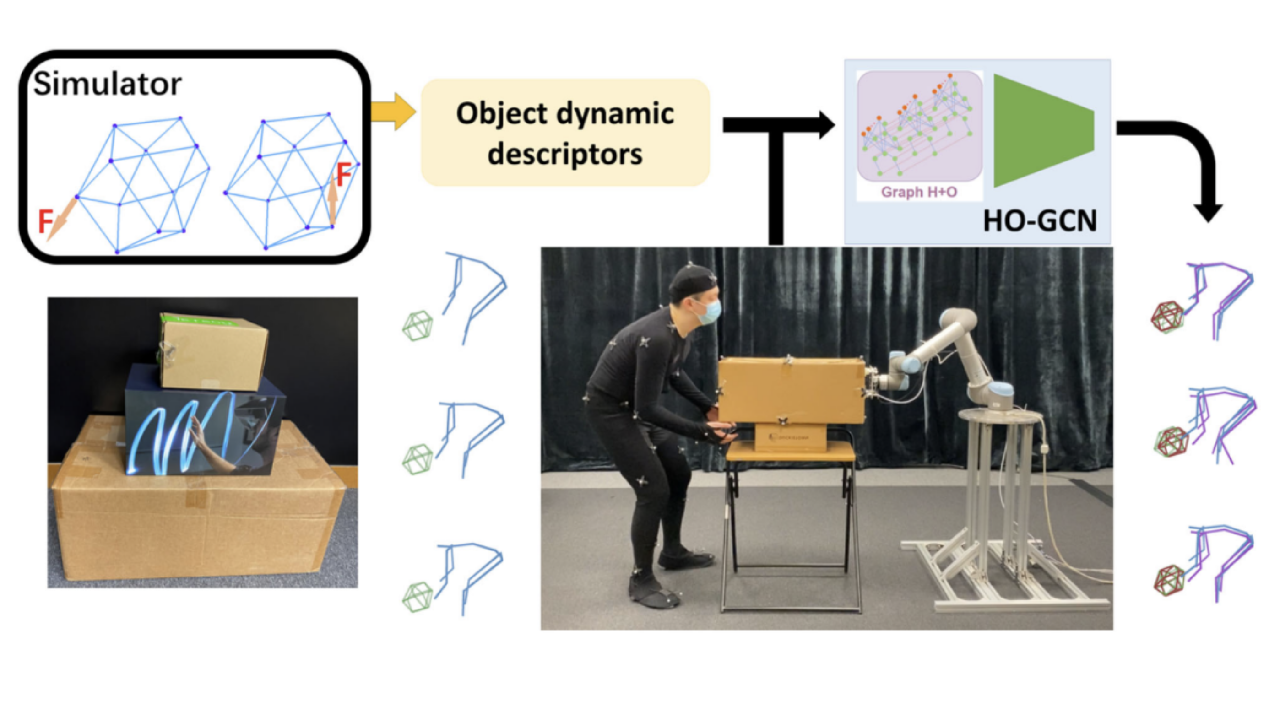
开发了一种深度学习方法用于预测操作员的预期动作,以便机器人与操作员完成一系列生产制造任务。该方法能够预测操作员搬运大型物件时的交互动作、亦可透过一种高效数据驱动的方式估计在协作任务或遥控操作任务,操作员控制该物件的意图。

商品化机会
项目咨询, 承包研究项目, 技术共同开发
解决方案
制造现场是一个动态变化环境,周边协作人员及对象不断移动,机器人在受到物理干预时,很多时候会被停止移动以确保安全。 而且没有任何预先路径规划的机器人很难适应新环境。 虽然机器人专家正在解决这些关键问题,但现有的解决方案无法扩展到大规模定制,这正正是许多工业和服装制造业的趋势
创新技术
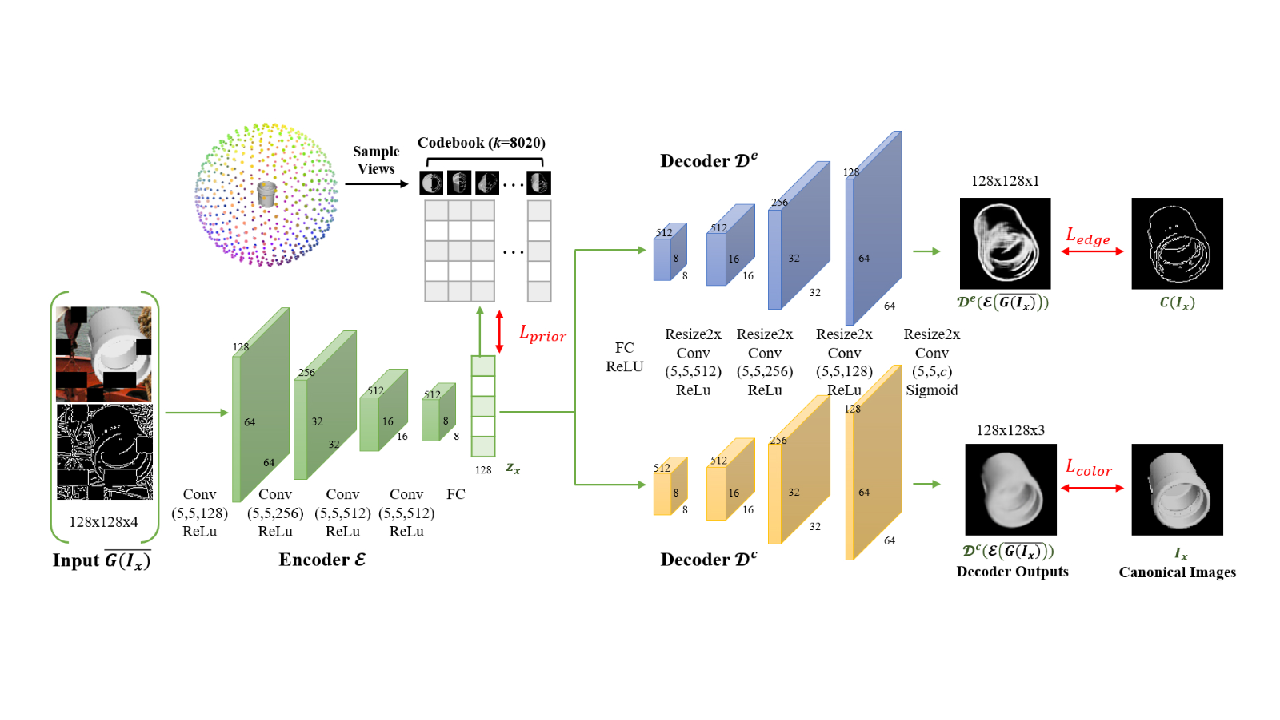
- 采用离线和在线学习系统,使用深度神经网络训练机器人以感知共同协作人员的意图。
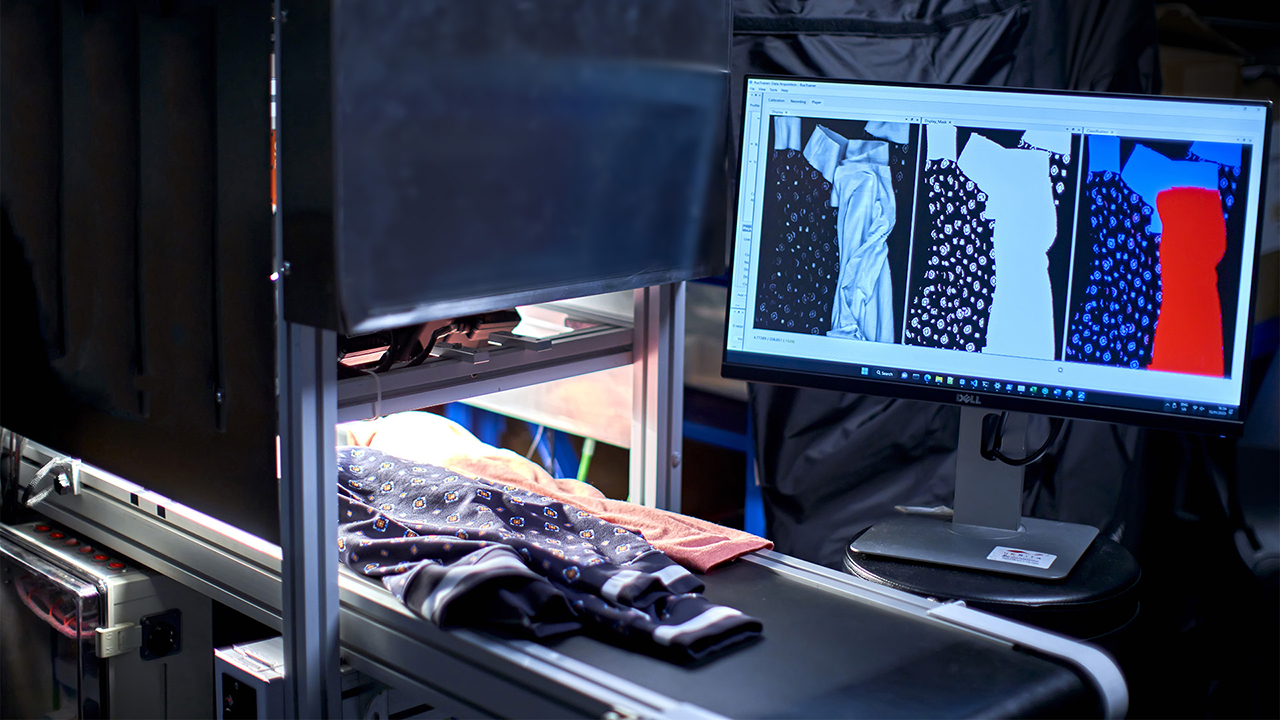
- 本项目开发的感知算法,用于准确有效地捕获3D环境信息,具有正确感知和准确测量周围环境的重要能力,例如在场人员、工具和对象以及工作站等。
- 专门设计及以人为本的接口,可实现机器人和人类之间的直观通信。
主要成效
- 本系统使机器人能够通过人与人之间的协作数据中学习,可靠地预测协作人员的意图和目标,并使自己适应真实工业场景中的特定任务。
- 机器人根据被分配的制造任务,针对任务及个别协作人员作出适应调整,实时正确反应。
- 确保工作安全,能够针对不同任务对机器人进行快捷高效的在线编程。
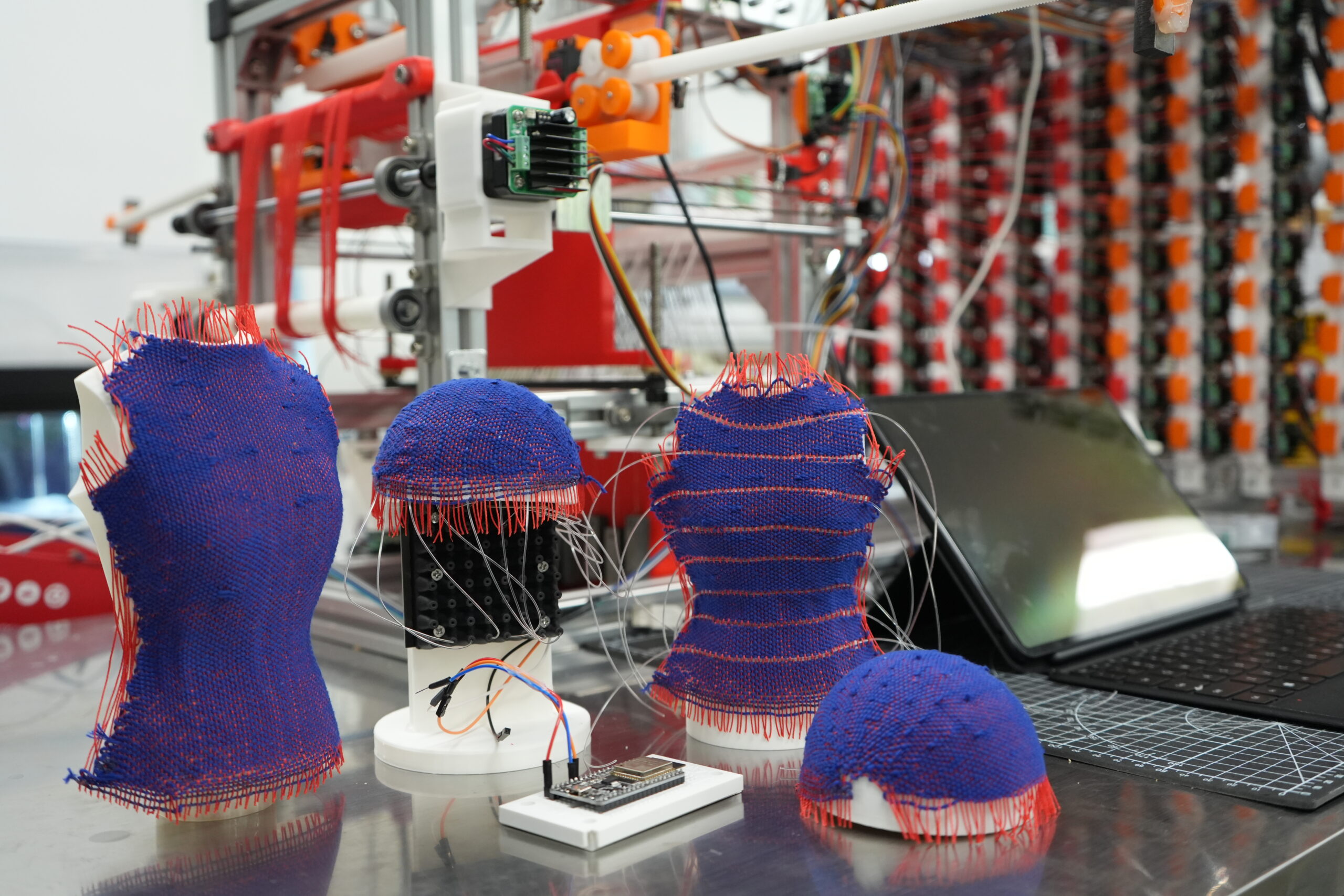
创新制衣技术研发中心(TransGP)由香港大学及日本东北大学合作成立。中心旨在为未来社会的需求提供解决方案。随着传统工业逐步迁出主要城市、人口老龄化等因素将导致劳动力短缺。中心致力推动再工业化,特别是制衣业的转型发展。虽然制衣业订立了明确的转型目标,但至今仍以高度劳动密集的生产模式为主。中心现正进行一系列研究项目,通过发展人工智能和机械人技术,以缩短产品开发周期、提高生产效率及减低出错机会,同时将高风险的工序自动化以提升安全水平。
查询