一種用於人機協作時預測人類後續動作的方法

簡介
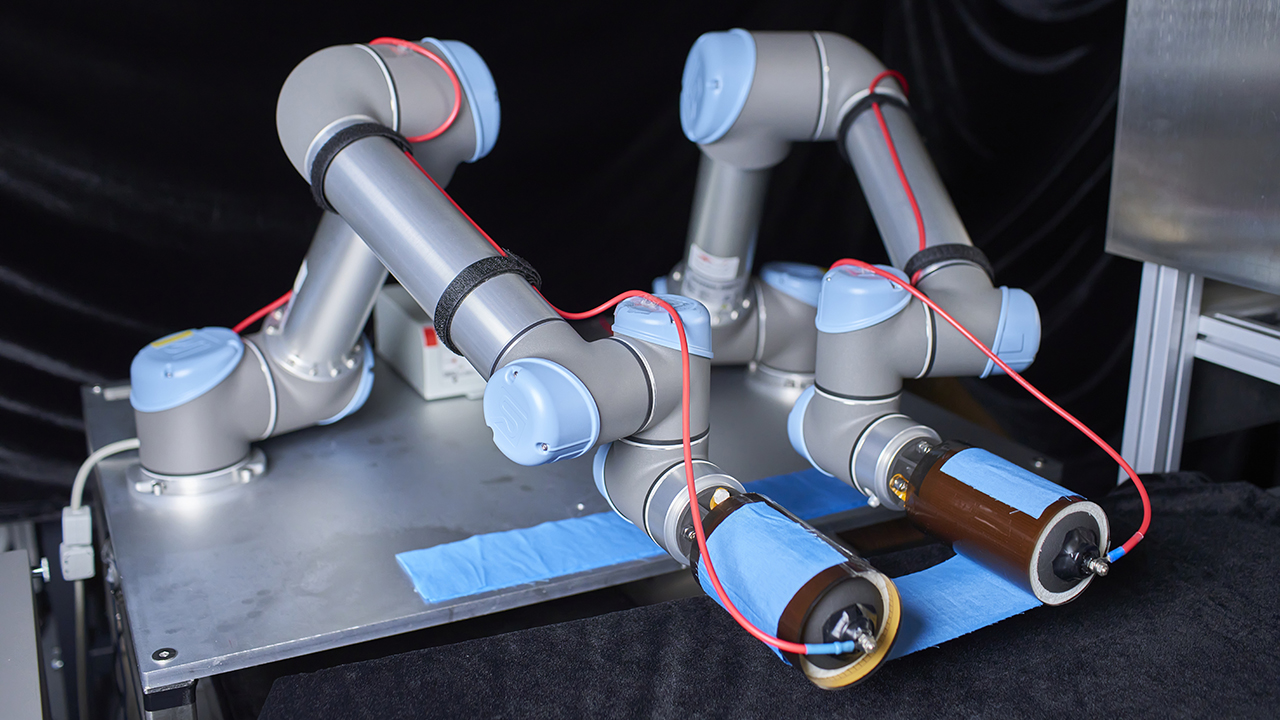
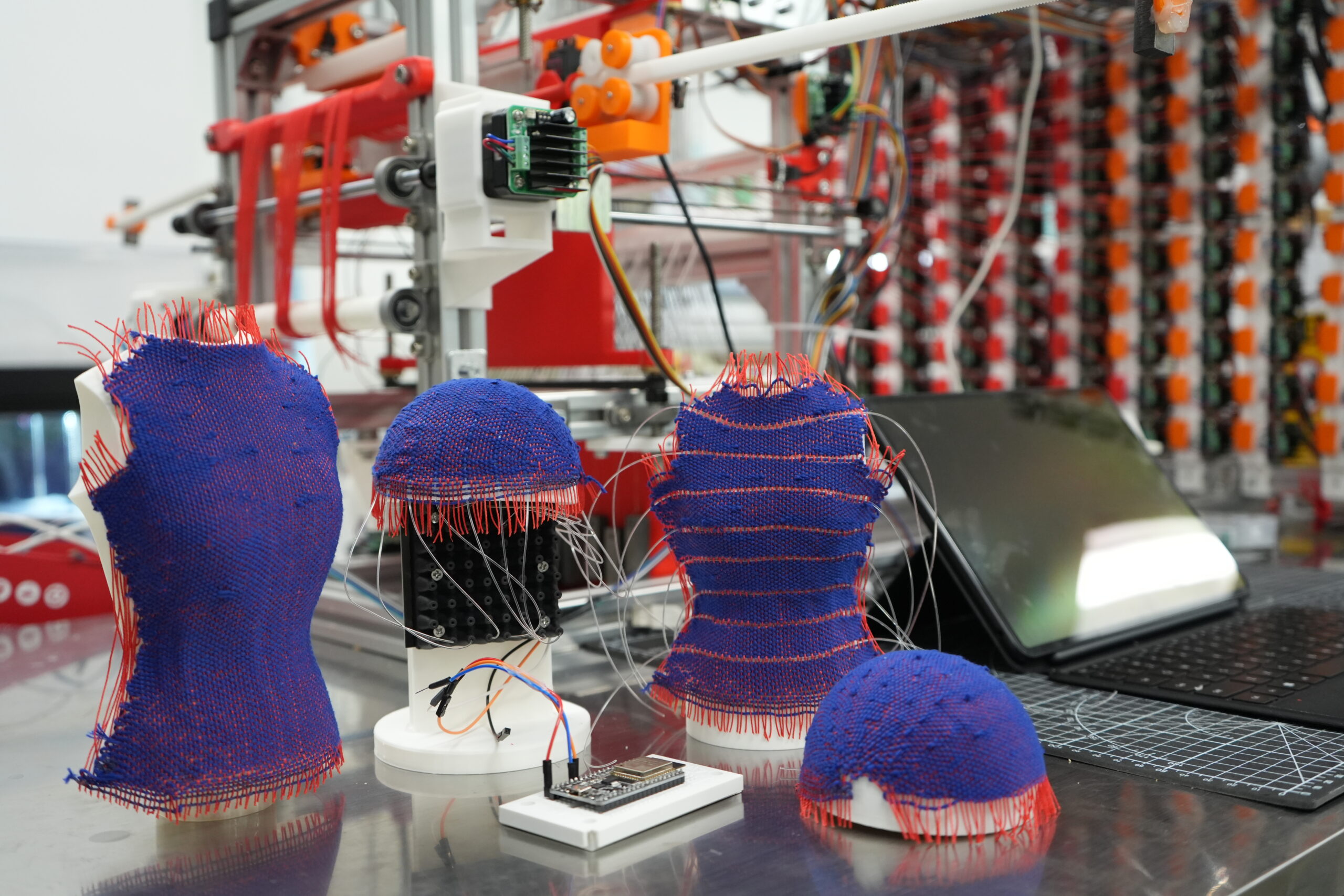
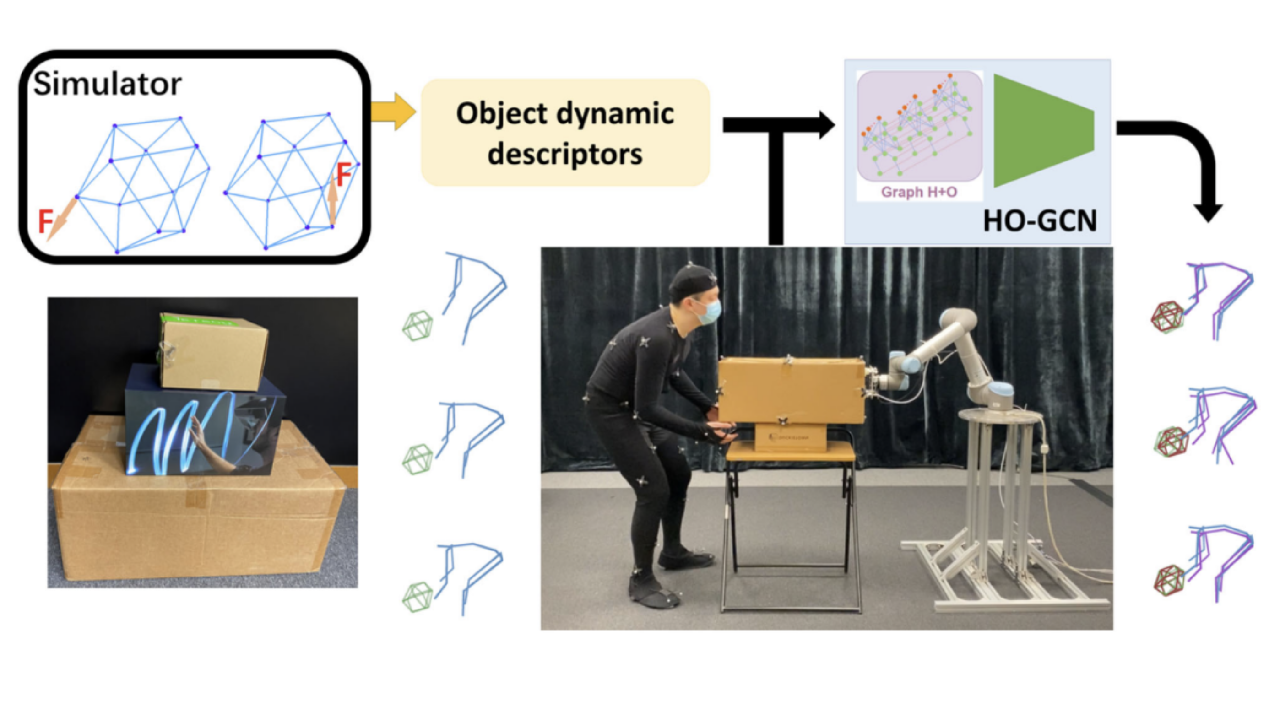
開發了一種深度學習方法用於預測操作員的預期動作,以便機器人與操作員完成一系列生產製造任務。該方法能夠預測操作員搬運大型物件時的交互動作、亦可透過一種高效數據驅動的方式估計在協作任務或遙控操作任務中操作員控制該物件的意圖。

商品化機會
項目諮詢, 承包研究項目, 技術共同開發
解決方案
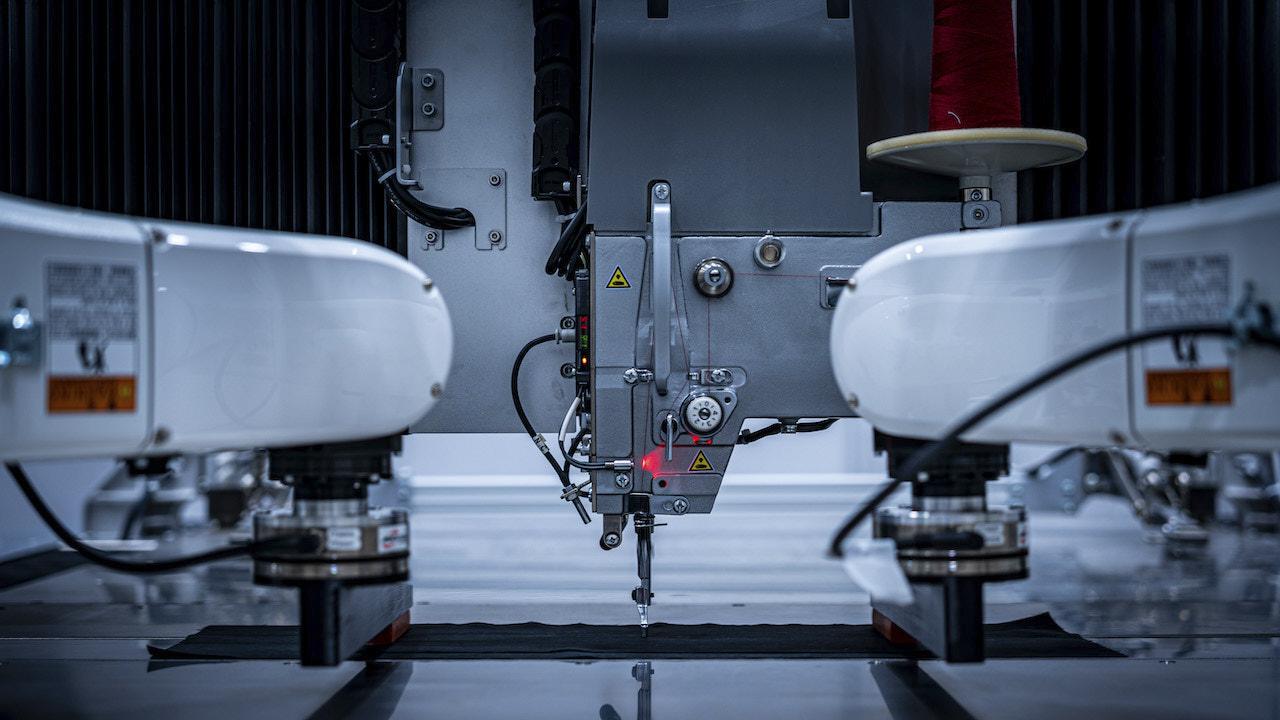
製造現場是一個動態變化環境,周邊協作人員及物件不斷移動,機器人在受到物理干預時,很多時候會被停止移動以確保安全。而且沒有任何預先路徑規劃的機器人很難適應新環境。雖然機器人專家正在解決這些關鍵問題,但現有的解決方案無法擴展到大規模定製,這正正是許多工業和服裝製造業的趨勢。
創新技術
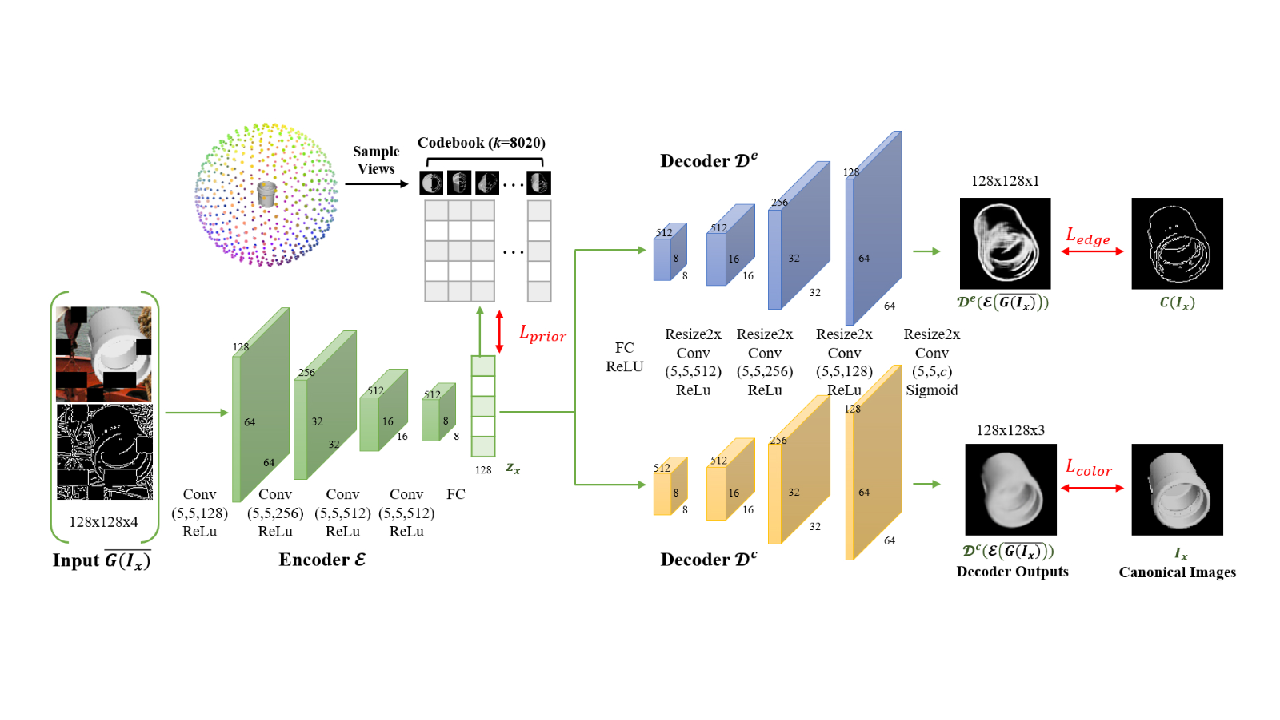
- 採用離線和在線學習系統,使用深度神經網路訓練機器人以感知共同協作人員的意圖。
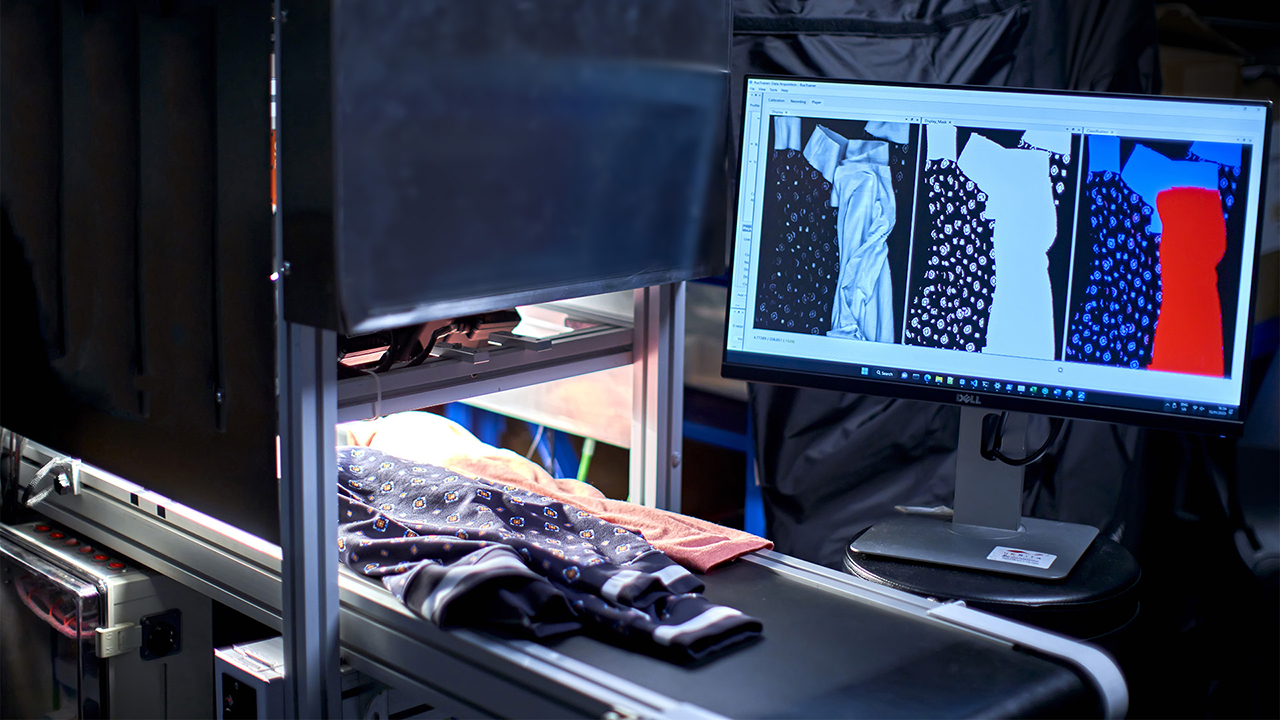
- 本項目開發的感知演算法,用於準確有效地捕獲3D環境資訊,具有正確感知和準確測量周圍環境的重要能力,例如在場人員、工具和物件以及工作站等。
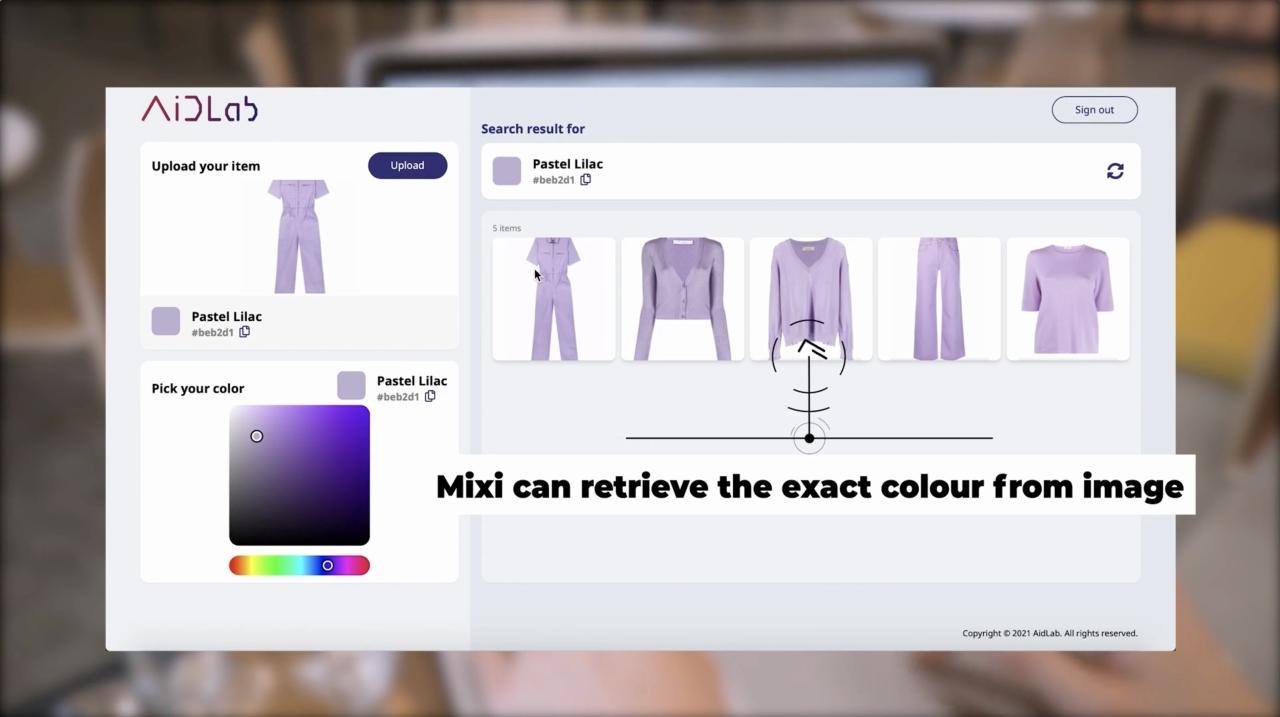
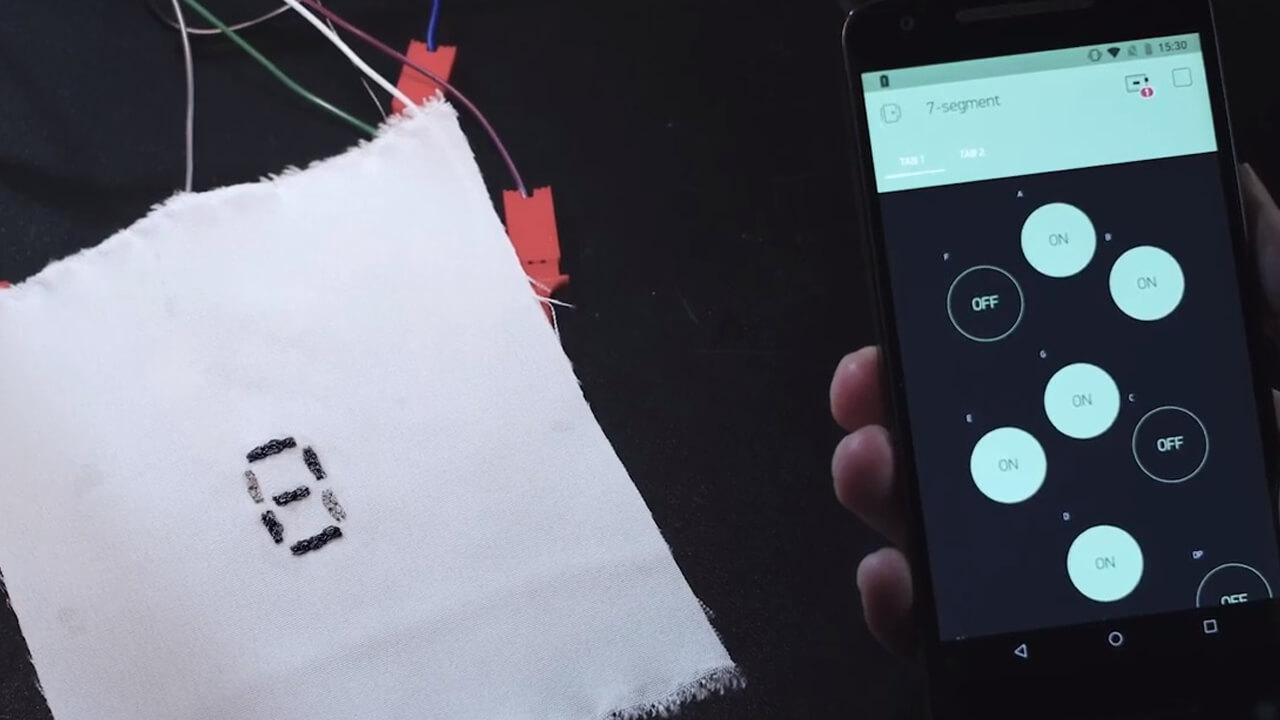
- 專門設計及以人為本的介面,可實現機器人和人類之間的直觀通信。
主要成效
- 本系統使機器人能夠通過人與人之間的協作數據中學習,可靠地預測協作人員的意圖和目標,並使自己適應真實工業場景中的特定任務。
- 機器人根據被分配的製造任務,針對任務及個別協作人員作出適應調整,實時正確反應。
- 確保工作安全,能夠針對不同任務對機器人進行快捷高效的在線編程。
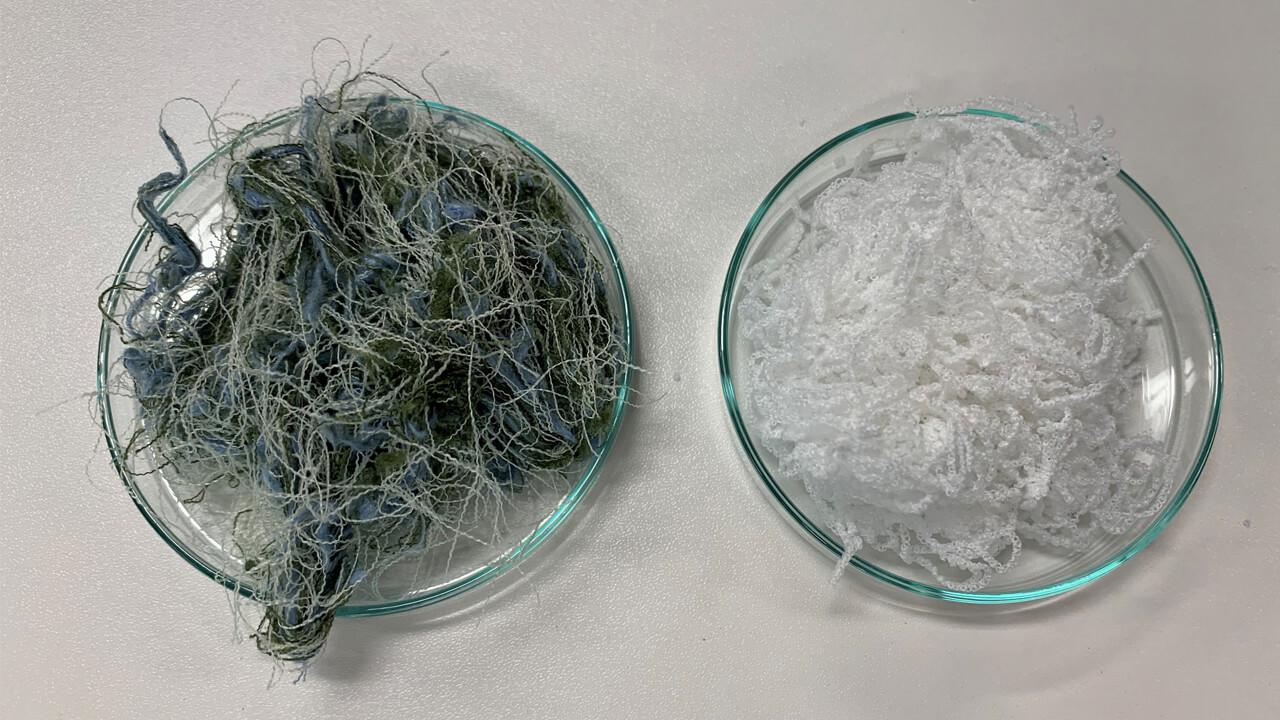
創新製衣技術研發中心(TransGP)由香港大學及日本東北大學合作成立。中心旨在為未來社會的需求提供解決方案。隨著傳統工業逐步遷出主要城市、人口老齡化等因素將導致勞動力短缺。中心致力推動再工業化,特別是製衣業的轉型發展。雖然製衣業訂立了明確的轉型目標,但至今仍以高度勞動密集的生產模式為主。中心現正進行一系列研究項目,通過發展人工智能和機械人技術,以縮短產品開發周期、提高生產效率及減低出錯機會,同時將高風險的工序自動化以提升安全水平。
查詢