Compact Electro-adhesion Gripper for Fabric Handling

Overview
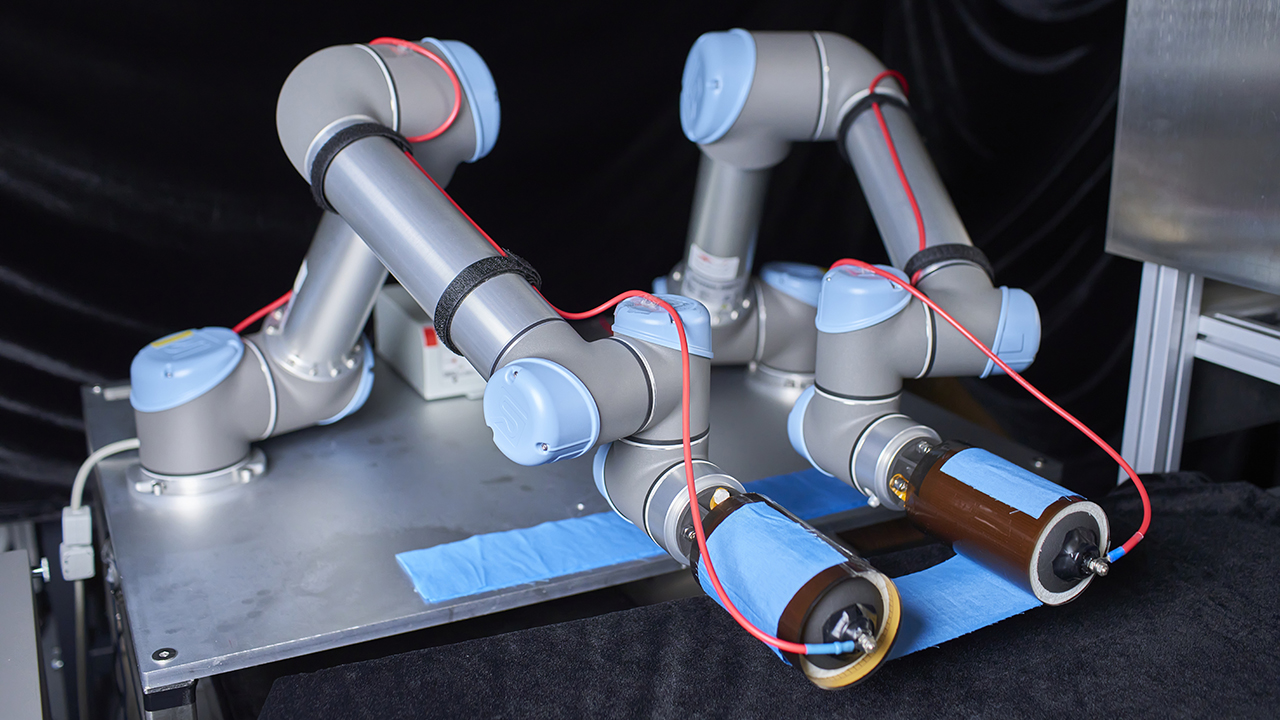
A pair of robust electrostatic grippers controlled by robotic arms for robustly grasping large, soft and thin fabrics piece by piece from fabric piles.

Technical name of innovation
Compact Electro-adhesion Gripper for Fabric Handling
Research completion
2024
Commercialisation opportunities
Technology licensing
Problem addressed
Textiles industry has a lower automation level when compared to other industries. Fabric manipulation is one of the manual tasks in the industry. Meanwhile, there are other drawbacks of common fabric manipulation grippers. Grasping or punching style grippers damage the fabric, while flat-plate electro-adhesive gripper cannot grasp a piece of fabric larger than the area of the plate.
Innovation
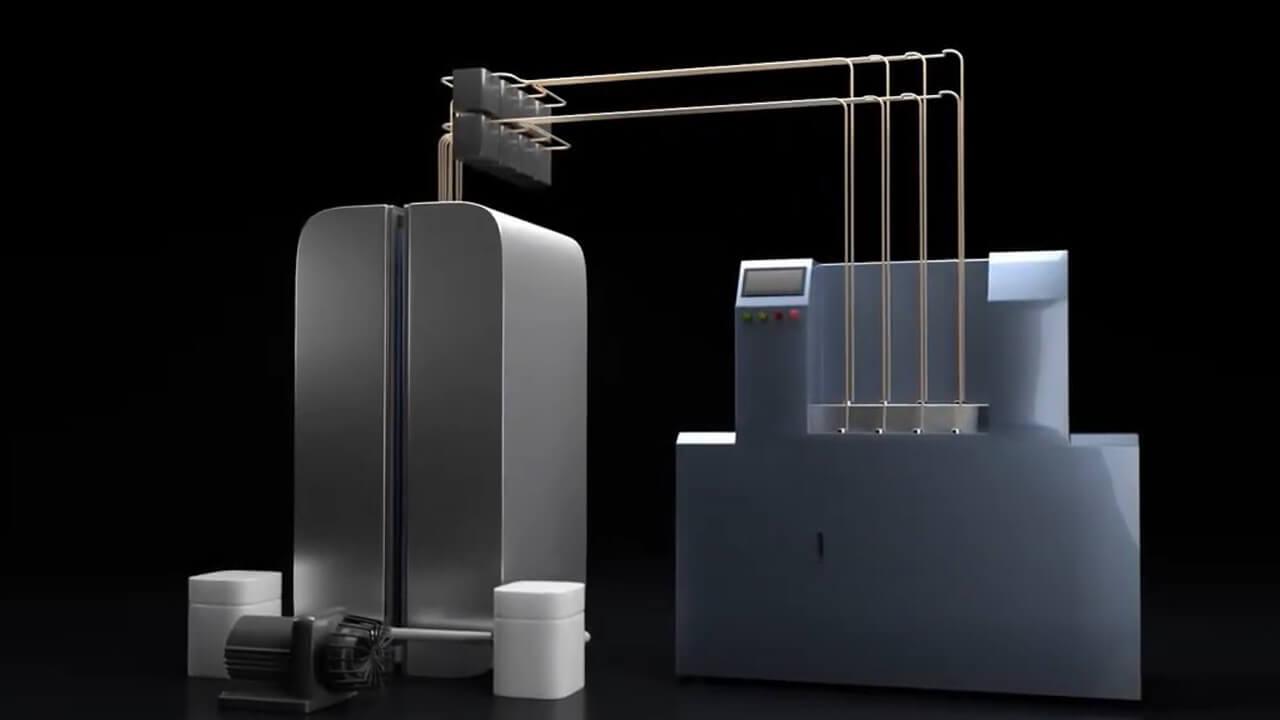
- Roller-type gripper is a novel design. Simply positioning the rollers at the two edges of the fabric, the roller firmly grasp the fabric even its size is bigger than the roller.
- The roller uses electro-adhesion force to robustly grasp fabrics from a pile layer by layer.
Key impact
- Controlled by robotic arms, the roller makes the whole fabric manipulation process more flexible and efficient, increasing the level of automation of textiles industry.
Award
- Gold Medal with Congratulations of the Jury in the 48th International Exhibition of Inventions of Geneva (2023)
Application
- Fabric handling and manipulation
Patent
- 22023068641.6 (Hong Kong)
The Hong Kong Research Institute of Textiles and Apparel (HKRITA)
Established in 2006, The Hong Kong Research Institute of Textiles and Apparel (HKRITA) is funded by the Innovation and Technology Commission of the HKSAR government, and hosted by The Hong Kong Polytechnic University.
HKRITA has achieved research deliverables over the years around our research clusters targeting in sustainability, industry advancement and social benefits through our centre-owned research teams and laboratories as well as collaborations with industry partners and institutions.
Enquiry