可灵活抓取物品的混合结构柔性机械爪

简介
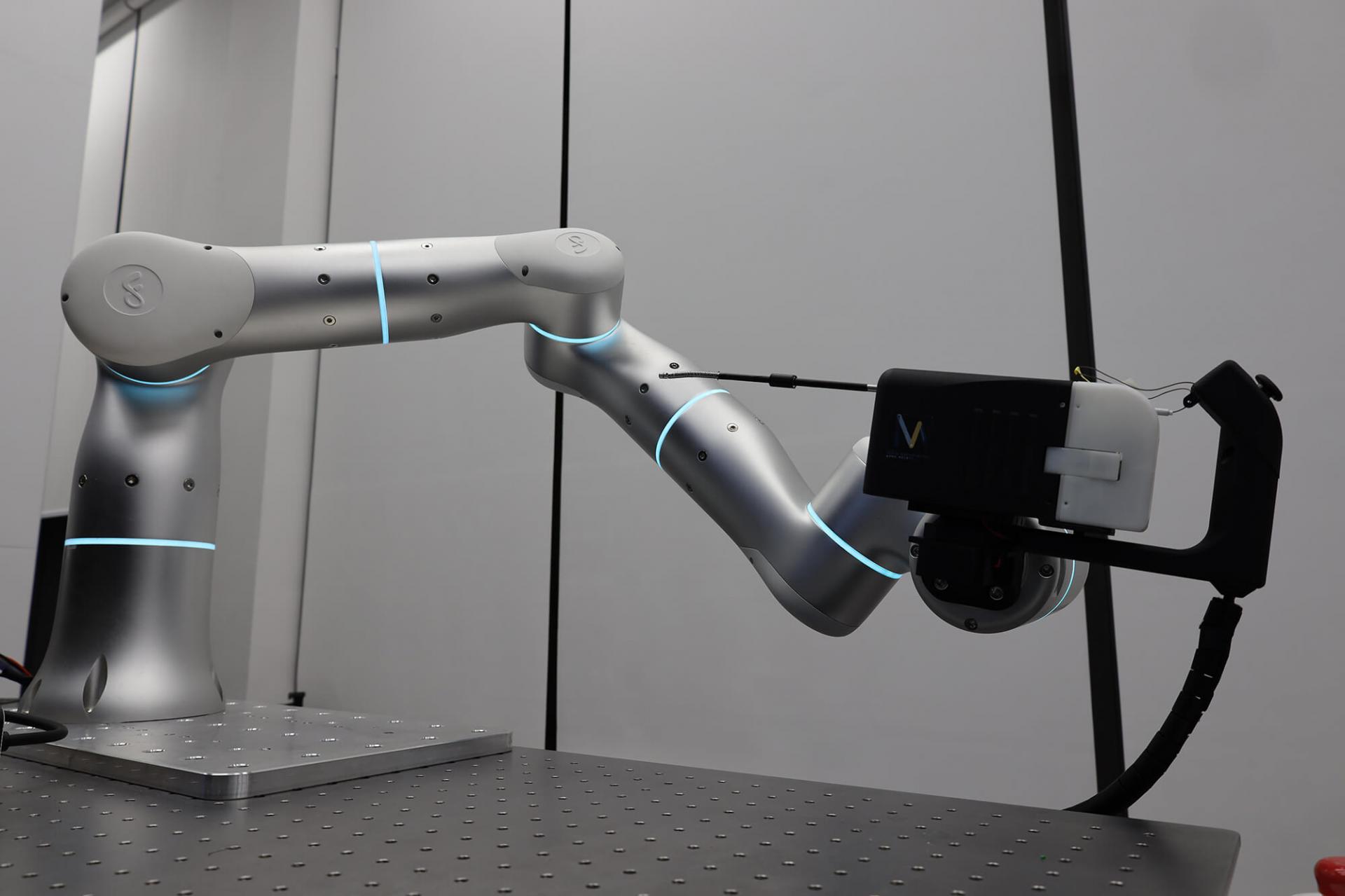
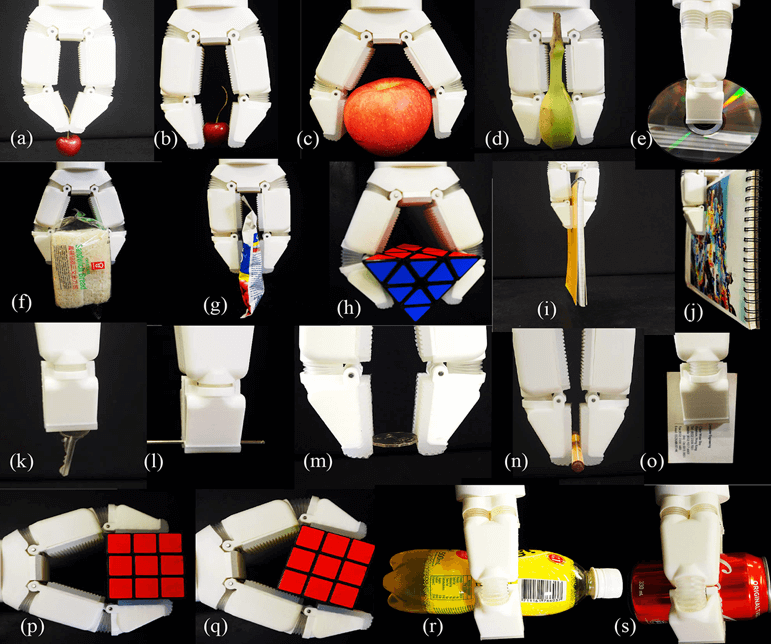
一款稳固与灵活兼备的夹爪,由柔性和线性气动驱动器与刚性接头结合而成


商品化机会
授权许可
解决方案
采用机器人操纵系统的主要限制是缺乏灵活的夹持装置。现有机器人系统无法自动处理可变物体和非结构化任务。
创新技术
- 本发明介绍了一种独特的方法,透过结合柔性和线性性驱动器与刚性接头,实现稳固而灵活的抓取功能。
- 整个系统考虑到设计的承受能力,其中的模块化手指结构可根据工作要求,简易地切换不同的末端执行装置。
- 软性驱动器灵活度高,具备柔性特质,而销接位可令结构更加稳固。这「刚柔混合」的结构令机械爪抓夹时具适应性及稳固性。
主要成效
- 重量轻且有效载荷比率高(自身重量 25 倍的有效载重率)。
- 备有 4 种不同的抓夹模式,灵活性高
- 设计成本低,维护简易
- 灵活的软关节设计,混合结构有助提高稳定性和刚性,气压驱动装置采用电子控制
应用范畴
- 处理精细物品的服务型机器人
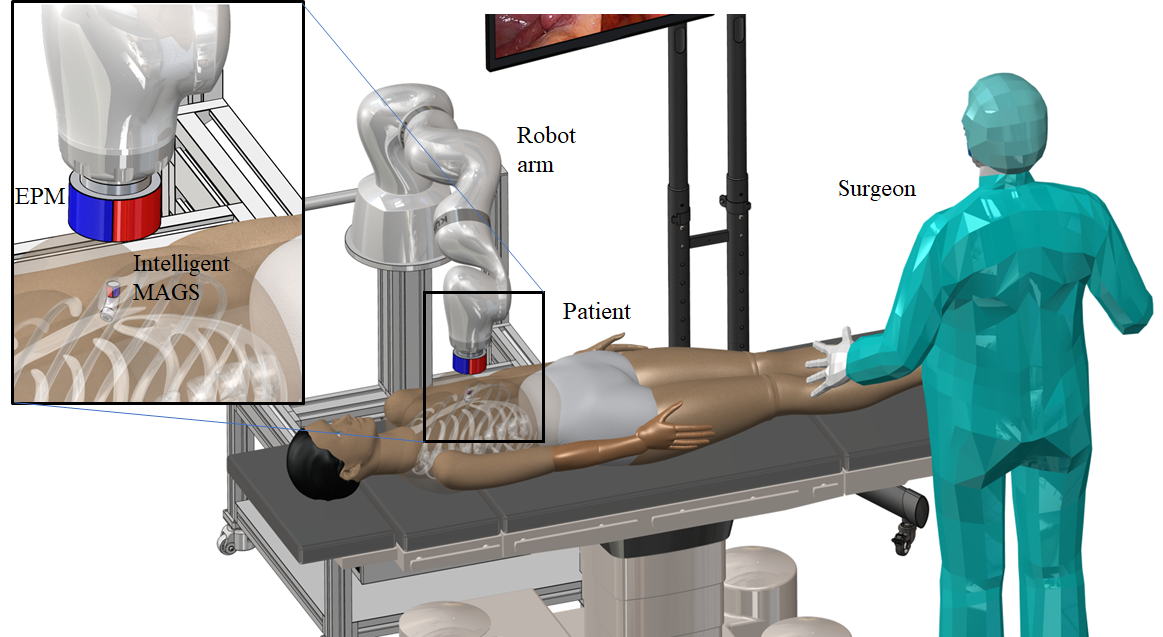
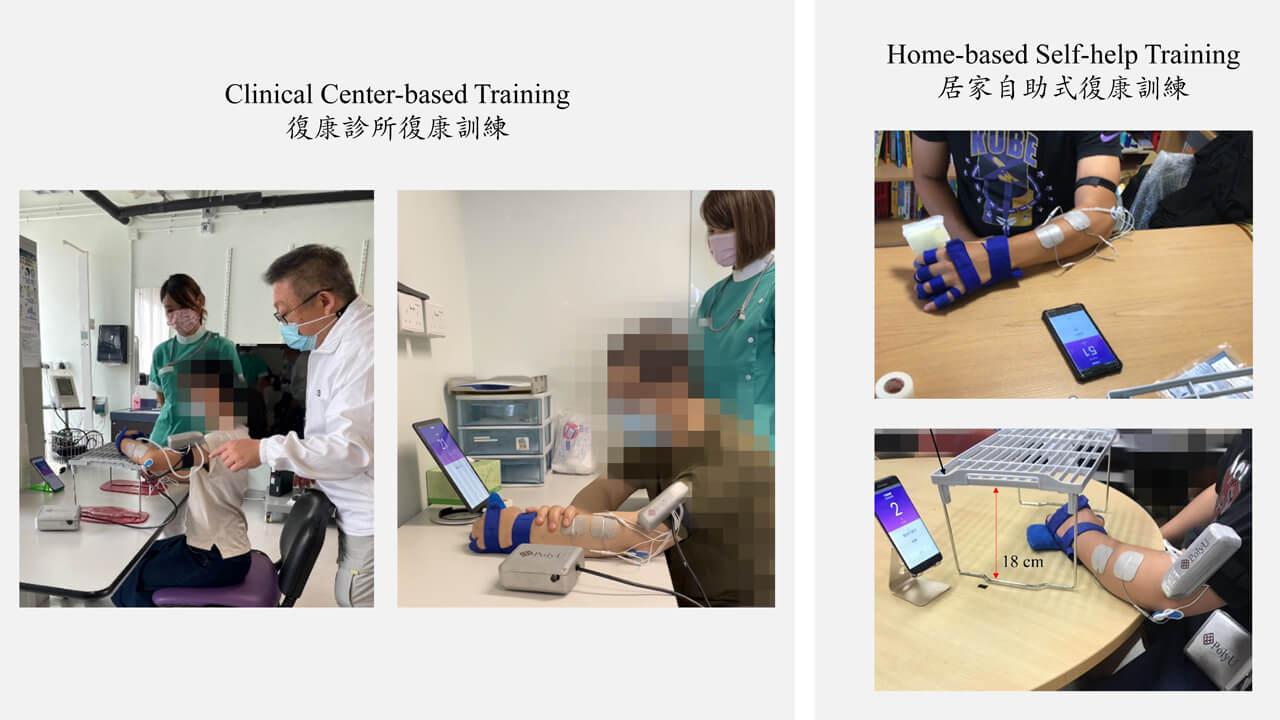
- 协助病人康复的医疗机器人
- 与人类互动的穿戴式机器人
专利申请
- PCT 申请编号 PCT/CN2018/120518
- 美国申请编号 16/769,376
- 中国申请编号201880080833.X
香港大学
香港大学于一九一一年创校,是香港历史最悠久的高等学府。港大创校至今逾一世纪,一直致力于创造知识、拓展教育、贡献社会。今天的港大是一所以研究为主导的世界级综合大学,校内设有十所学院,以自由、自主精神为学,力倡学术多元化。港大学术研究成就卓越,多年来深受本地、国内以至国际机构的认可,包括在竞争激烈的「优配研究金」、「卓越学科领域计划」及「主题研究计划」中占最多获批项目数量及最大份额的资助。港大与时并进,在研究和知识交流等方面不断创新,培养优秀科研人才,同时汇聚各种领域的专家,涵盖课题广博,为不同行业带来裨益。港大亦积极发展国际学术交流,与全球顶尖学府及科研机构携手合作;当中一百三十九位教授根据其学术文章获征引次数获评为全球最顶尖的百分之一科学家;获中国科学院和工程院院士衔的学者在本地院校中为数最多。
查询