Magnetically-guided Endoscope (MGE) for Complete Small Bowel Examination and Diagnosis and Treatment of Small Bowel Diseases

Overview
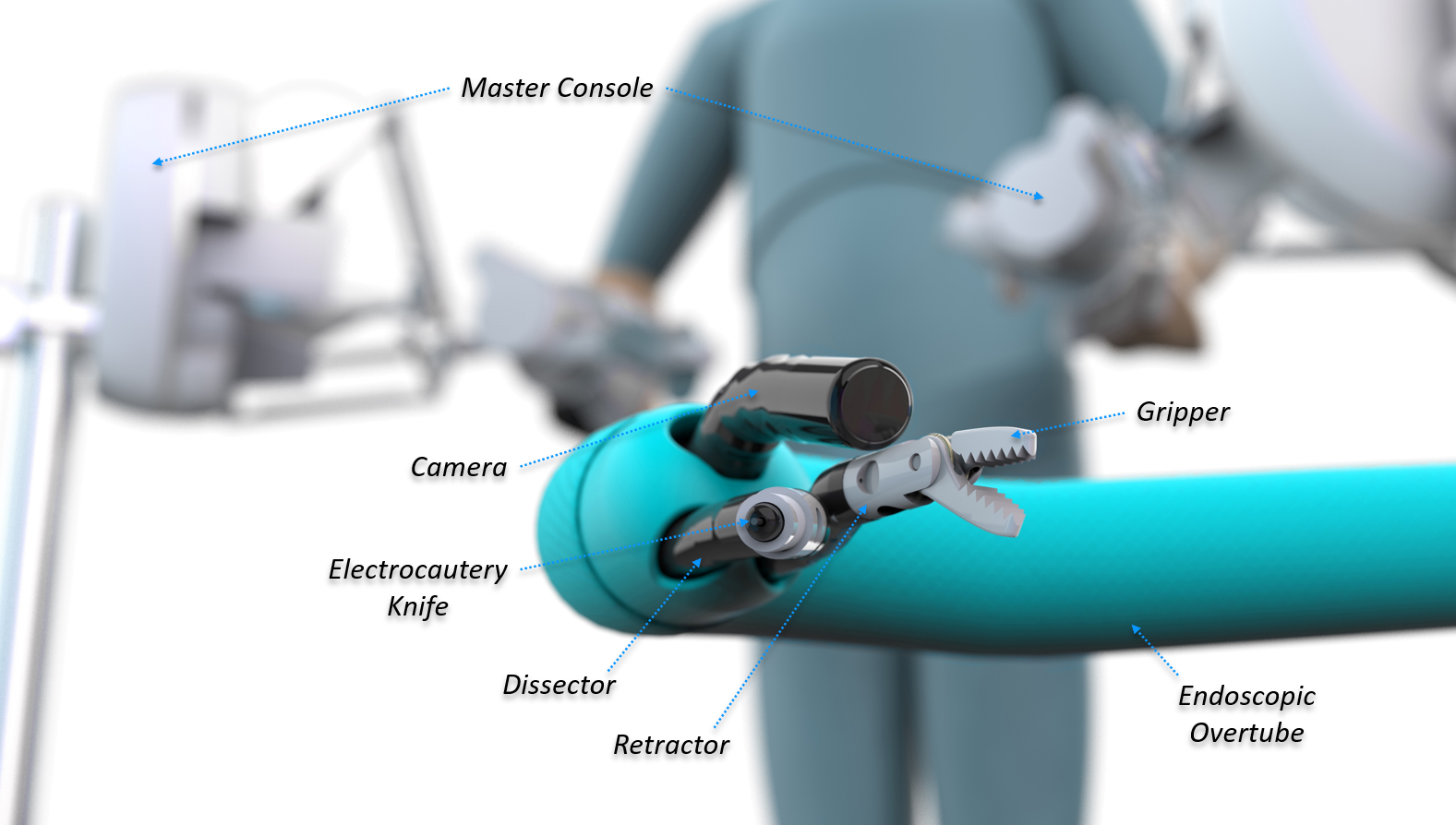
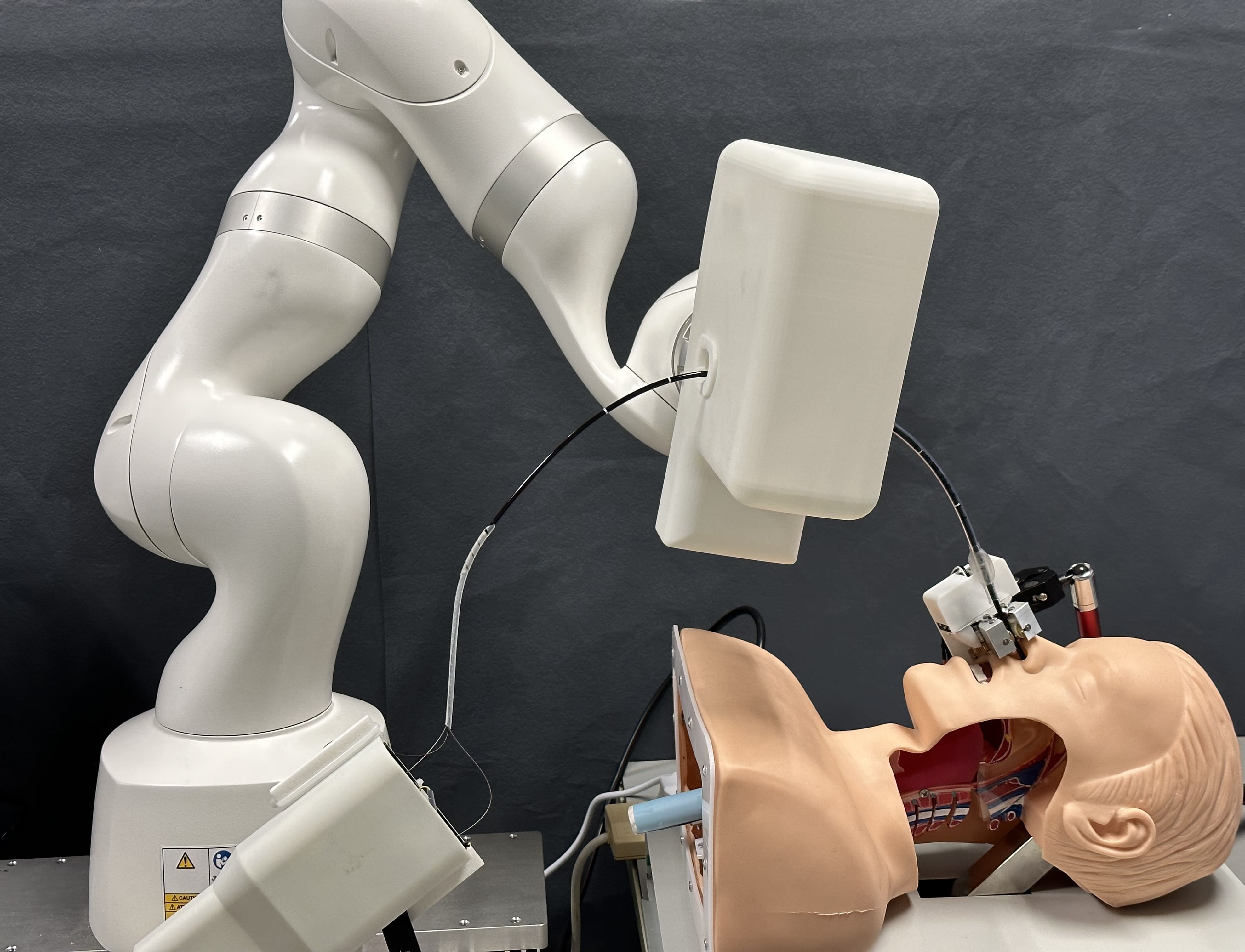
This project aims to develop a flexible, magnetically-steered endoscope with a novel rotary actuation method to quickly and easily traverse the entire length of the small intestine, and to take samples of the epithelium and gut microbiota at regular intervals.

Problem addressed
The precise correspondence between intestinal microbiota and disease remains elusive, largely because traditional endoscopes cannot reliably access the whole length of the small intestine. While the duodenum is usually accessible using classical push-endoscopy techniques, the jejunum and ileum, where most microbiota live and where the vast majority of nutrient absorption occurs, are notoriously difficult to access non-invasively.
Innovation
- Patented rotate-to-advance actuation method
- Biopsy modules at regular intervals
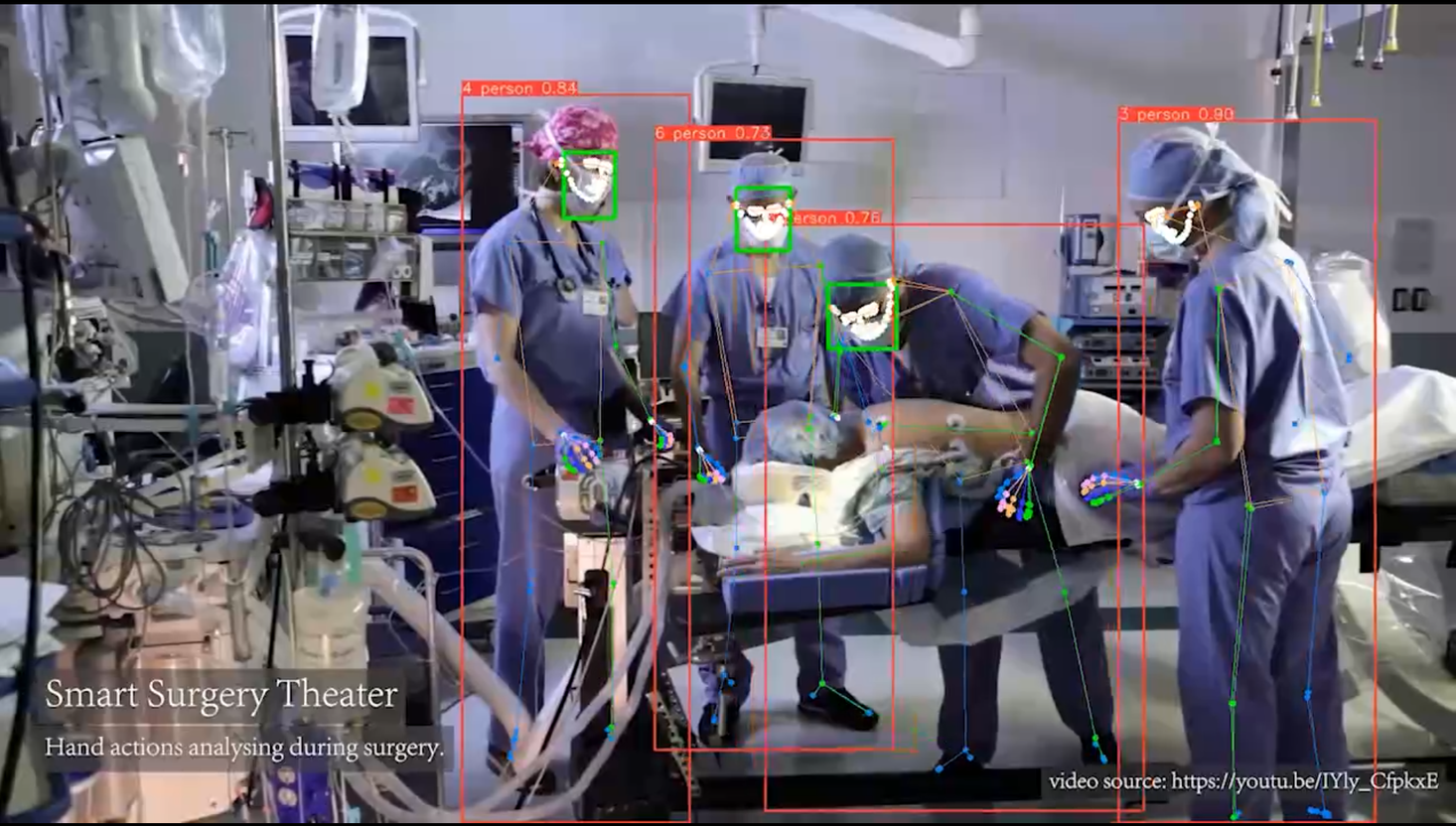
- Partial automation of endoscopy procedure
Key impact
- Eliminate restrictions of pull-wire actuation with improved dexterity and smaller diameters
- Enable extensive and thorough sampling of small-intestinal microbiota
- Allow for semi-autonomous or even remote operation
- Improve patient comfort
Application
- Small Bowel Examination and Diagnosis
- Treatment of Small Bowel Diseases
- Study of Microbiota in Patient Health
Patent
- EP 19190493.7
Through the InnoHK funding support of the HKSAR Government, the Multi-Scale Medical Robotics Center (MRC) was established in 2020 by the Chinese University of Hong Kong in collaboration with ETH Zürich, Imperial College London, Johns Hopkins University, and the University of Hong Kong. We bring the worlds of medicine and robotics together, focusing on technological innovation with a strong emphasis on clinical translation and direct patient benefits.
Furthermore, we support three areas of research including: Endoluminal multi-scale robotic platforms for diagnostics and therapeutics, Magnetic-guided endoluminal robotic platform, Image-guided robotic interventions.
Enquiry



















![Long COVID Test: [Non-Invasive Stool Test to detect distinct gut microbiome profile associated with “Long COVID”]](/uploads/image/202304/6802a81a4ec6afc2ac97f3912ec9a7f4.jpg)